Tree detection & mapping workflow
Workflow details in development
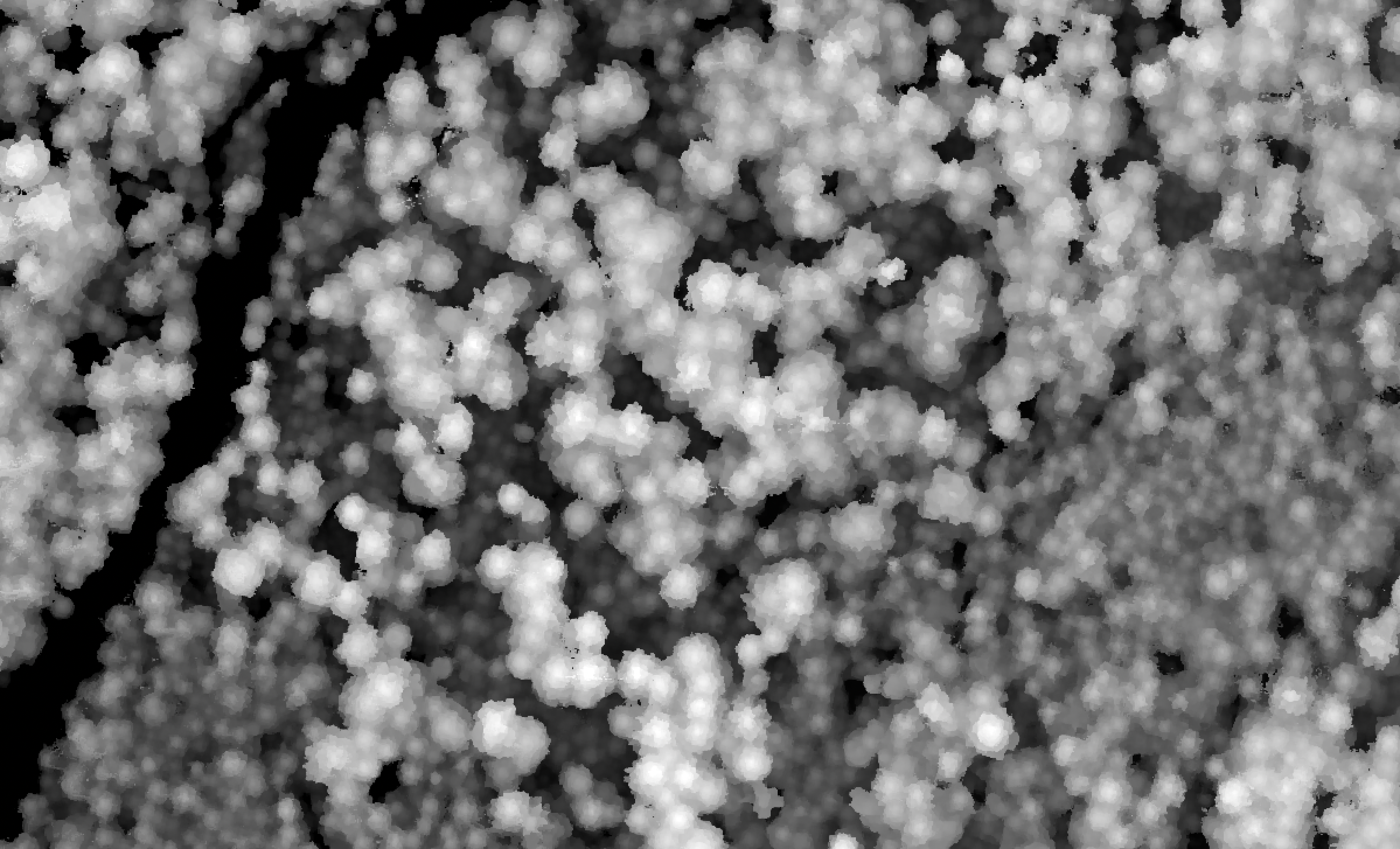
Canopy height model (CHM) production
After creation of a point cloud via photogrammetry, we process it to compute a digital surface model (DSM). The DSM is a high-resolution (~10-cm) raster indicating the elevation of the vegetation (or ground) surface in each pixel. Then, we subtract elevation values from a high-resolution digital elevation model (DEM). The result is a canopy height model (CHM) indicating the height of the vegetation above the ground in each pixel.


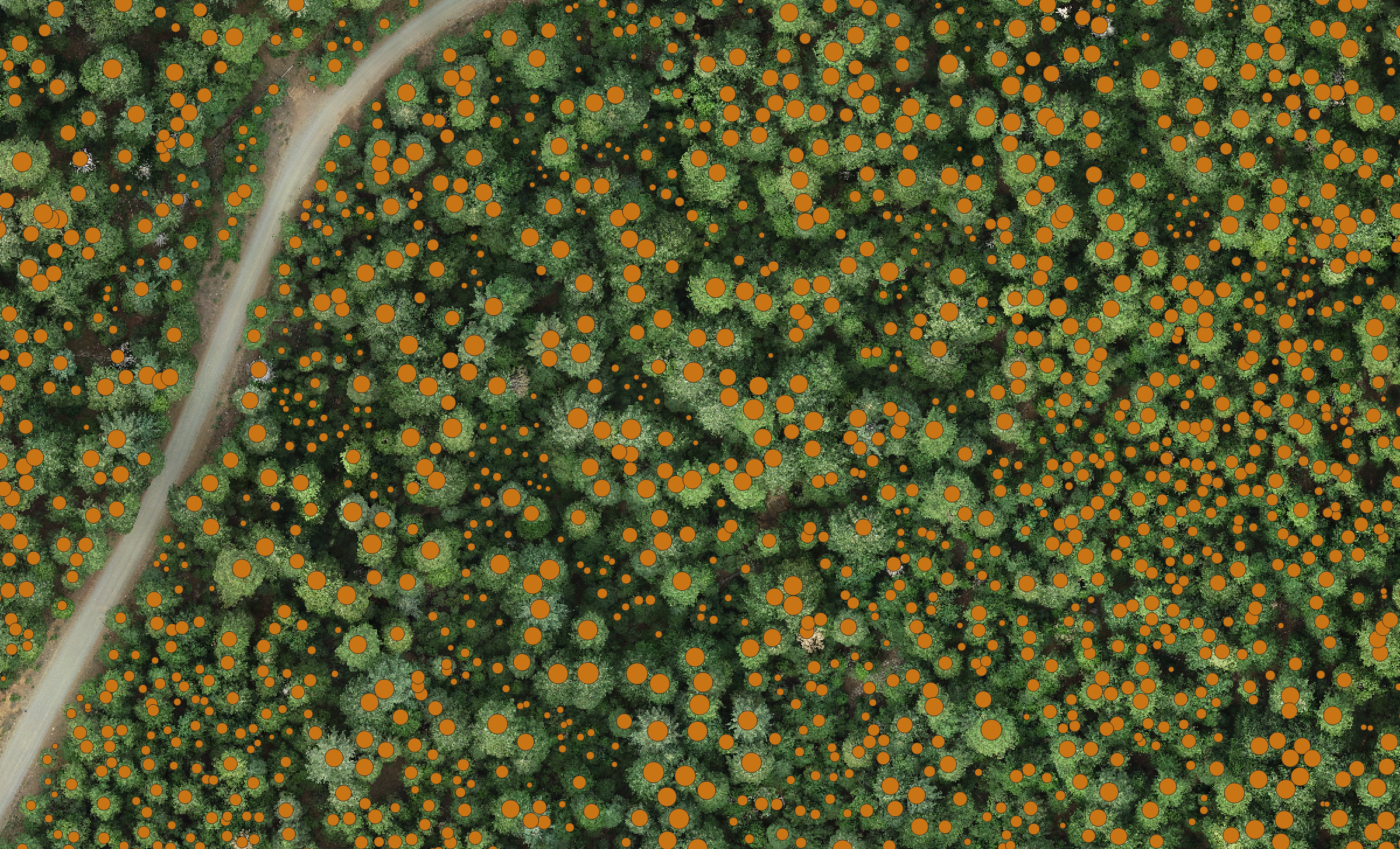
Tree detection
Next, using an algorithm such as (a) the variable-window filter implemented in the ForestTools R package or (b) DeepForest with some post-processing, we detect individual tree tops, and their associated heights, from the canopy height model. The selection and parameterization of the optimal tree detection algorithm is a complex process and can depend on the approach used for drone imagery collection and processing. We have evaluated the interactions between these choices and identified a an accurate tree detection method and parameterization for structurally complex conifer forests. The results are published in Methods in Ecology and Evolution.